
| Mission |
Progress |
The Boat |
Control |
Software |
Map |
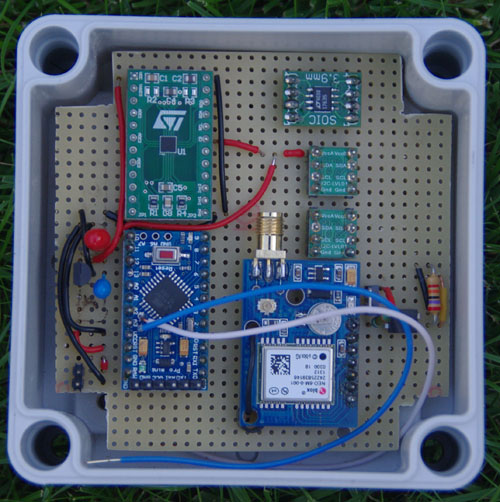 |
Description of components. Starting at the top left, the components are: Compass chip; PSU for GPS module; I2C convertor between CPU and compass; I2C convertor/buffer beween CPU and GPS; GPS module (its the one with the aeria socket); To the right of the GPS are componts to control the servo; CPU (a micro-Arduino) To the left of the CPU are the 5V and 3.3V regulators. |
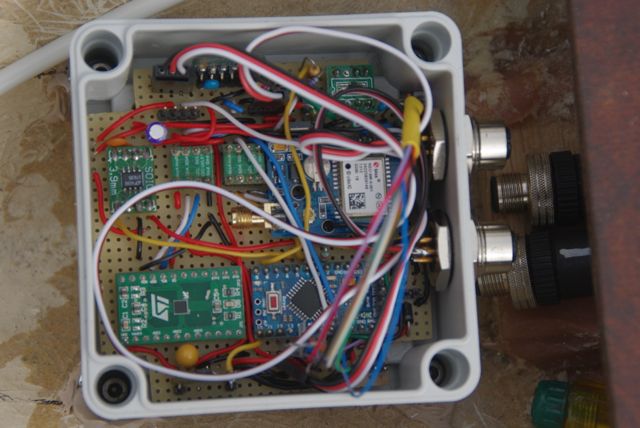 |
This is the control circuit once all
the wires have been added. (It is photographed 90 degrees rotated
compared to the photo above.) Also added since the above picture are
a DAC which carries on producing an analogue voltage when the
Arduino is in sleep mode. The voltage is set using the I2C bus. (It
is difficult to see, but is at the top of the picture, just to the
right of the connector at the top left of the board.) To drive the servo, also added, is an analogue-to-PWM chip. This produces a PWN signal for the servo, using the analogue voltage output of the DAC described previously. This is at the very top right of the board. |
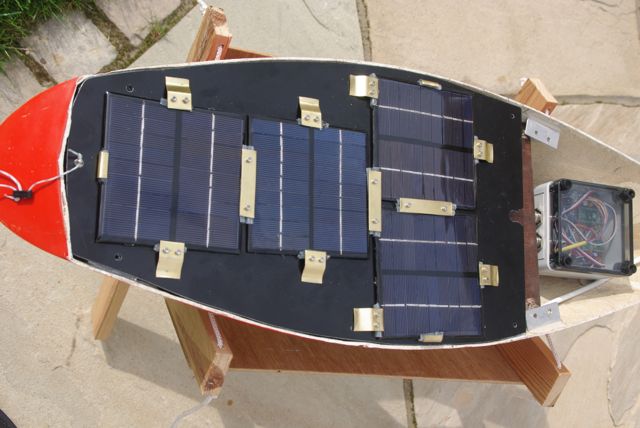 |
This shows the rear of the deck (the
mast has been taken off). Here you can see the 4 solar panels to
provide the power for the control. These are wired to the
rechargable battery in the centre of the hull. Each panel is about
110mm square. |